
“天威-实验”AUV
“天威-试验”AUV一款水下自主观测载体平台。该系统平台采用航行器流体力学设计、低速航行鳍舵组合控制、自主导航定位等技术,具有航路自主规划、定深航行、安全布放与回收功能,可实现遥控与自主航行两种控制模型。
查看详情
“天海一号”ROV
“天海一号”ROV是针对海洋牧场应用开发的一款遥控水下作业机器人系统平台。该机器人针对海洋,牧场近水面波流耦合、障碍物密度大等问题,重点开展操纵性预报与精准控制、自适应性相关研究。
查看详情
智能检测平台
本平台的建设综合了光学、机械、电子、计算机软硬件等方面的技术,涉及计算机、图像处理、模式识别、人工智能、信号处理、光机电一体化等多个领域。
查看详情
肢慧智能下肢康复训练机器人
“肢慧”智能下肢康复训练机器人旨在为膝关节手术后的病人提供康复训练理疗,通过多轨迹、多运动模式的康复训练可以有效避免术后膝关节功能障碍等后遗症的产生,促进病人的康复。
查看详情
多功能生物配体分离提取仪
型号:SMI 096型,该设备是目前生物药检测行业国内首台用于抗药抗体提取的专用设备,仪器采用独特设计的磁棒和磁阵排列,最高能够将10毫克级别的药物浓度中提取抗药抗体,处于国际领先水平。
查看详情
输液器缠绕进包装设备
输液器缠绕进包装设备可实现普通输液器、带排气输液器、TPE输液器的自动缠绕、进袋、封口和喷码。
改变当前输液器缠绕进包装手工作业模式,提高生产效率和产品的一致性,能有效降低生产成本,可和输液器前端组装机组合实现输液器的全自动生产。

食用菌采摘机器人
针对规模化种植的高附加值菌类采摘难题,研发集移动底盘、采摘机械臂、双目视觉检测、智能采摘工具为一体的机器人系统,通过移动底盘在线遍历食用菌种植区域,基于双目视觉实时检测符合采摘要求的菌类并获取其位置、姿态,利用机械臂与采摘工具的自主、精确定位,实现成熟菌类的无损、高效采摘,解决人工采摘频繁、耗时的难题。
查看详情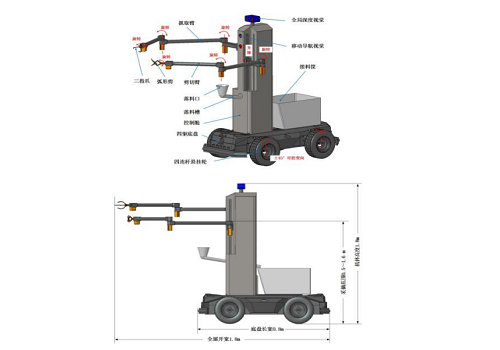
柑橘采摘机器人
针对规模化种植柑橘的及时采摘难题,研发集自主导航移动底盘、轻型机械臂、柑橘位姿检测、智能采摘工具为一体的机器人系统,采用双目视觉三维环境重建与多模导航技术,实现机器人自主移动问题,通过研制多关节机械臂并采用双臂协同控制技术,基于深度学习的图像处理方法获得柑橘的尺寸、位置、姿态,并研制高效率、多功能的末端采摘工具,多项技术有效集成与整合后可模仿人工采摘与剪枝过程,实现万亩果园的全自动采摘任务。
查看详情
茭白自动分拣及包装设备
茭白自动分拣及包装设备主要用于对农作物茭白进行品质分级,并将优劣等级茭白进行分箱包装的设备。设备主要由上料、分料、传送、图像识别、分拣机构组成。
查看详情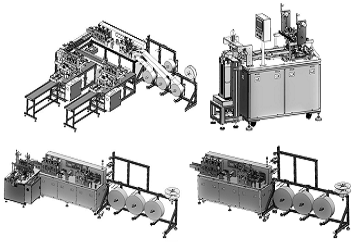
全自动高速平面口罩机
全自动生产线工艺流程,主要用于平面式口罩全自动生产成型,由放料架、打片机、耳焊机、 封边机、包装机等构成。

